Our 2013 Solar Water Heating Pump Controller is one of our most popular products offering user programmable automatic control a the pump in a solar water heating system.
 Today we finished an updated version of this controller which offer frost protection. Solar water heating collectors and the associated pipework can be damaged by freezing. One way to avoid this is to pump warm water from the hot water tank around the collector(s) when the ambient temperature outside gets close to freezing. This turns the collector into a radiator, radiating heat from the warm water through the pipes and collectors which prevents them from freezing.
Today we finished an updated version of this controller which offer frost protection. Solar water heating collectors and the associated pipework can be damaged by freezing. One way to avoid this is to pump warm water from the hot water tank around the collector(s) when the ambient temperature outside gets close to freezing. This turns the collector into a radiator, radiating heat from the warm water through the pipes and collectors which prevents them from freezing.
In general we recommend that solar water heating systems be drained in the winter to ensure that freezing and the associated damage cannot occur, but we made this particular controller for a customer in Canberra, Australia whose solar collectors have survived for 30 winters without coming to any harm. Also, although their are frosty nights in Canberra, it does not tend to get very very cold there.
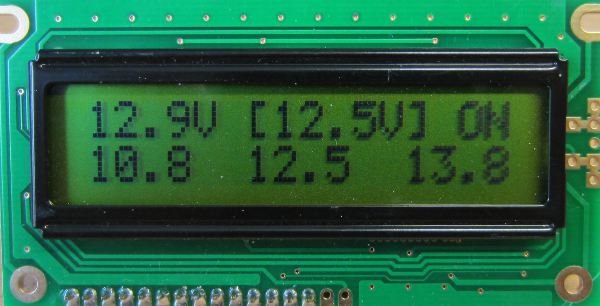
The modifications to the controller make it turn on automatically at a user programmable low solar collector temperature (e.g. +5 degrees Celcius), and then turn off when the collector temperature has increased by 2 degrees. This will have the effect of keeping the solar collector from freezing, but the side-effect is that the temperature of the water in the hot water tank will go down.
If you need a controller with frost protection, please contact neil@reuk.co.uk with details of your requirements. It is however only suitable for use in areas with occasional light frosts – otherwise we still recommend draining the system for its protection in the winter.